Convex and Affine Set
Line in Euclidean Space
A line through two points is defined as A line segment between two points is defined as

Affine Set
An affine set contains the line through any two distinct points in the set:
e.g. An entire 2D plane.
Theorem
Every affine set can be expressed as the solution set of a system of linear equations.
Convex Set
Let be a vector space. A subset of is convex if whenever and , we have �. That is it contains the line segment between any two distinct points in the set:
e.g. 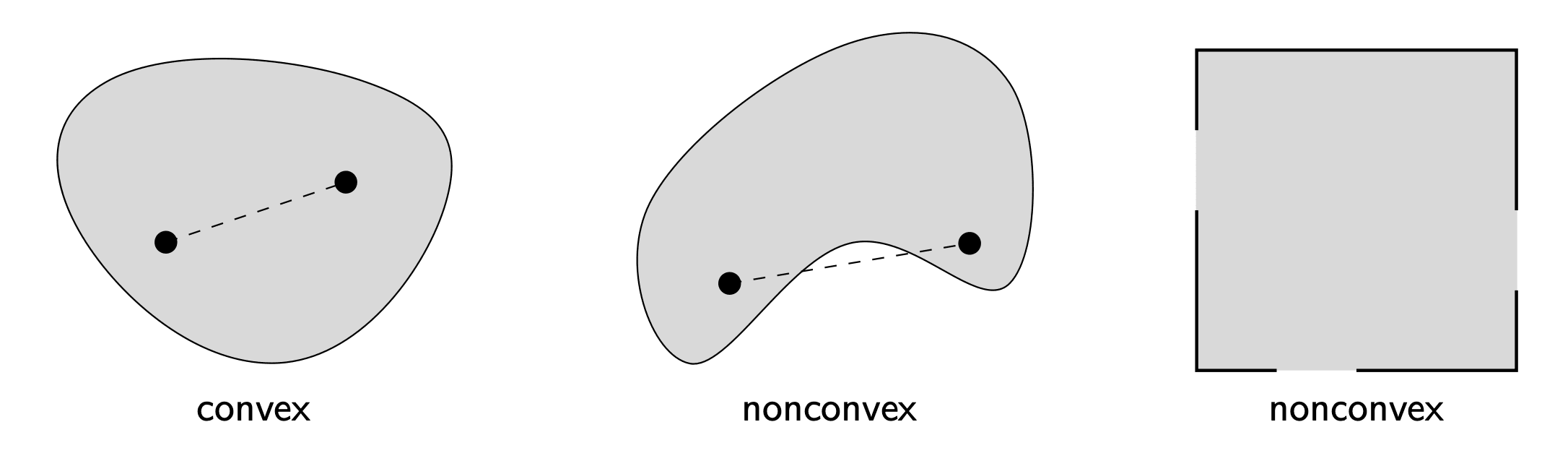
Convex Combination
A convex combination of is any point of the form:with and .
Convex Hull
The convex hull of a set of points , denoted , is the set of all convex combinations of the points in .
Proposition
The convex hull is the smallest convex set to contain all the points in the set .
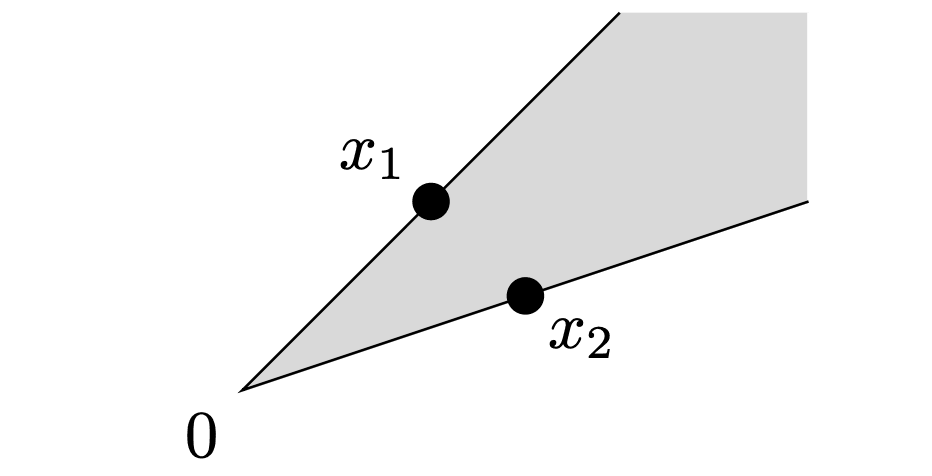
Cones
Convex Cone
Conic Combination
A conic combination of points and is any point of the form: with and .
Cone
A cone is a set containing all non-negative multiples of its points:
Convex Cone
A convex cone is a set containing all conic combinations of its points.
Proper Cone
e.g.
- Nonnegative orthant is a proper cone.
- Positive semidefinite matrices is a proper cone.
- Second-order cone is proper.
Dual Cone
The dual cone of a cone is
Positive Semidefinite Cone
Real Symmetric Matrices
We have the following notation for real symmetric matrices:
- is the set of symmetric matrices
- : positive semidefinite matrices:
- : positive definite matrices
Proposition
Prop iff all eigenvalues are real and nonnegative.
Proposition
Prop is a convex cone.
Hyperplanes, Halfspaces and Polyhedron
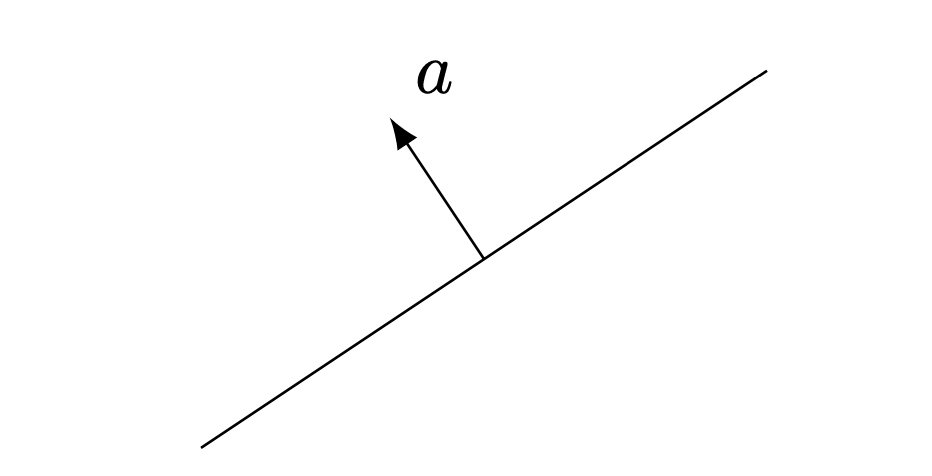
Hyperplane
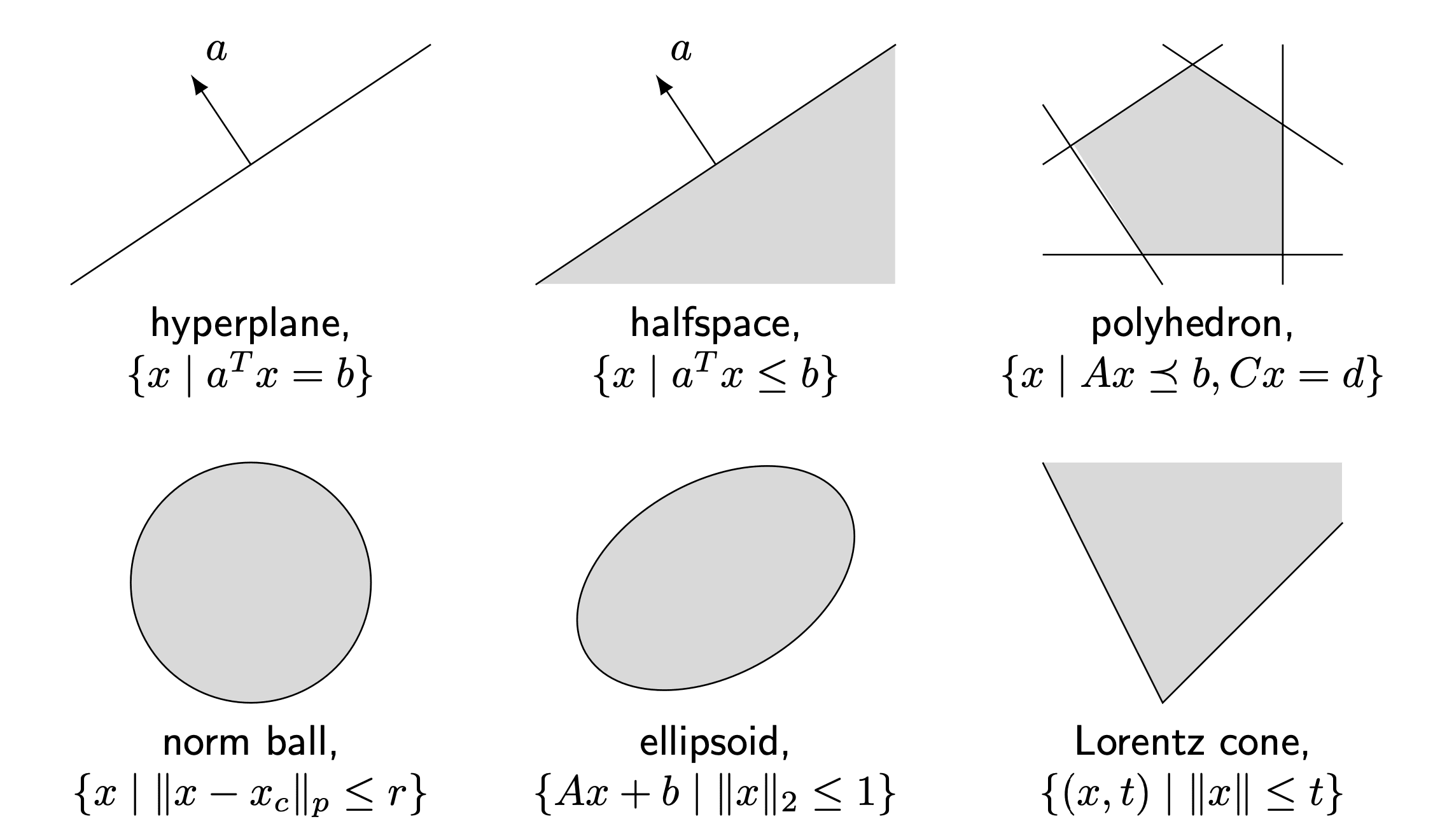
A hyperplane is a set of the form with . And we call the normal vector.
Halfspace
Halfspace is a set of the form with .
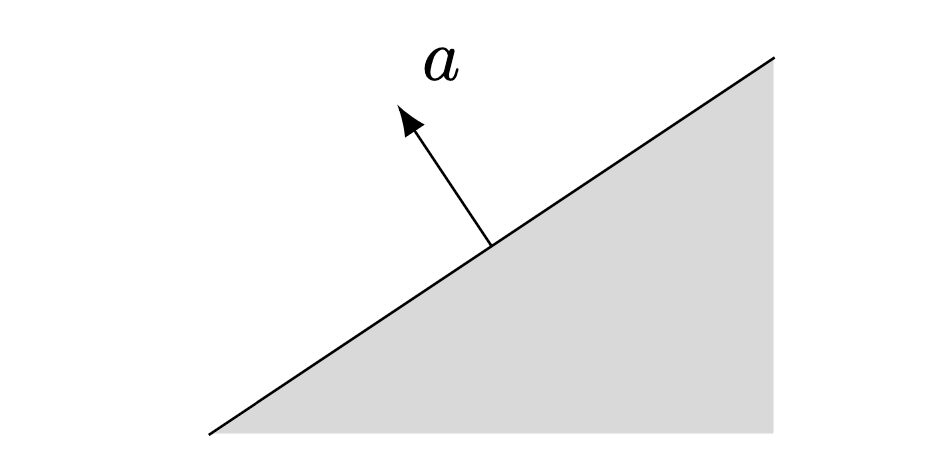
Prop Convexity of Hyperplane and Halfspace Hyperplanes are affine and convex, while halfspaces are convex.
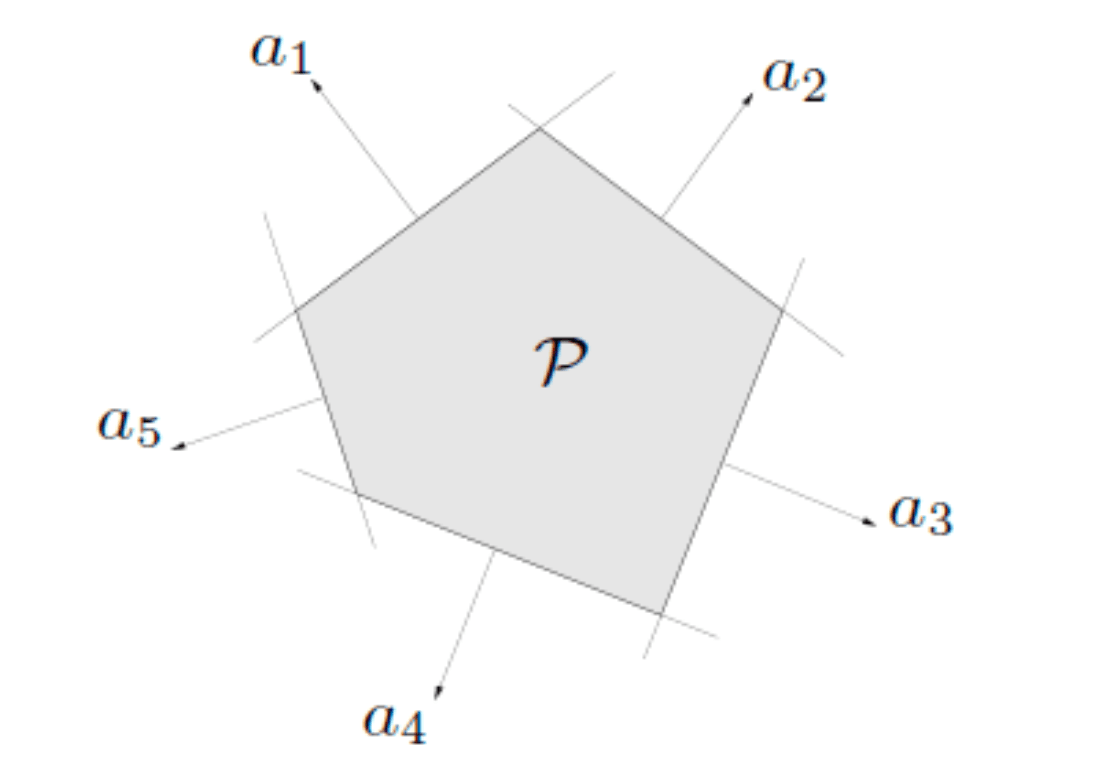
Polyhedron
A polyhedron is the intersection of a finite number of halfspaces and hyperplanes.
Proposition
A polyhedron is the solution set of finitely many linear inequalities and equalities: where , , is component-wise inequality.
Polytope
A polytope is a bounded polyhedron, i.e. a polyhedron with a finite number of extreme points. Equivalently, it is the convex hull of a finite number of points.
Balls and Norm
Euclidean Balls and Ellipsoids
Def Euclidean Ball A (Euclidean) ball with centre and radius is a set of the form:
Def Ellipsoid An ellipsoid is a set of the form:
where (i.e. is symmetric positive definite) Alternatively, we can represent an ellipsoid as with A square and nonsingular.
Norm Balls and Norm Cones
Def Norm Cone A norm ball with centre and radius is the set . A norm cone is the set . The Euclidean norm cone is also called the second-order cone.
Prop Norm balls and norm cones are convex.
Summary of Common Convex Sets
Operations that Preserve Convexity
Proposition
The intersection of arbitrarily many convex sets is convex.
Def Affine Function A function is affine if with , .
Prop The image of a convex set under affine function is convex:
Proposition
The inverse image of a convex set under affine function is convex:
Perspective Function
A perspective function is defined as:
Prop Images and inverse images of convex sets under perspective are convex.
Def Linear-Fractional Function A linear-fractional function is defined as:
Prop Images and inverse images of convex sets under linear-fractional functions are convex.
Generalized Inequalities
Generalized Inequality
A generalized inequality relation defined by a proper cone satisfies where denotes the interior of .
Prop is a partial order, but not in general a linear order.
Prop .
Minimum
is the minimum element of with respect to if
Minimal
is a minimal element of with respect to if (for any)
e.g. Here . is the minimum element of ; is a minimal element of

Proposition
Minimum if exists, must be unique; however, several minimals may be found for given an generalized inequality induced by a proper cone .
Separating Hyperplane Theorem
If and are nonempty disjoint convex sets, there exists and such thatThat is the hyperplane separates and .
Supporting Hyperplane Theorem
A supporting hyperplane to set at boundary point iswhere and for all . And if is convex, then there exists a supporting hyperplane at every boundary point of .
